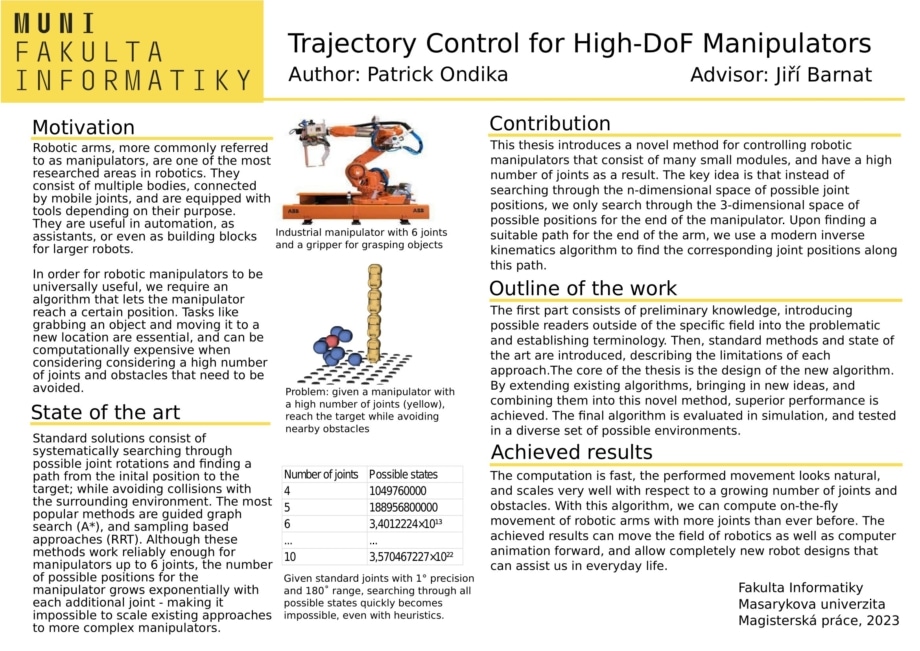
Ovládání trajektorie robotických ramen s vysokým stupněm volnosti
Autor práce
Patrick Ondika
Vedúci práce
Jiří Barnat
O projekte
Ročník