O súťaži
Ceny
Termíny
Porota
Hodnotenie prác
Ambasádori
Fotogaléria
Ako sa prihlásiť
Súťažiaci
Partneri
Pre médiá
Aktuality
Na stiahnutie
Kontakt
Kontakt
sk
cs
en
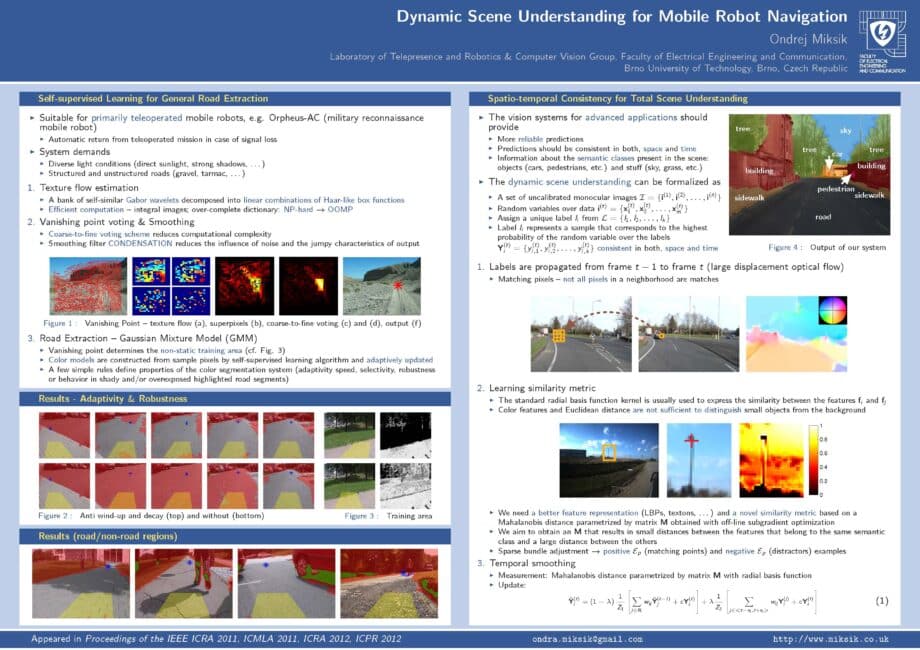
Dynamické rozpoznávání scény pro navigaci mobilního robotu
Autor práce
Mikšík Ondřej
Vedúci práce
Žalud Luděk
O projekte
Leták
Diplomová práca
Ročník
2012
Zdieľať túto prácu