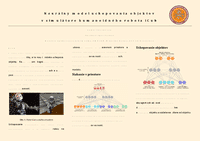
Zdechovan Lukáš Modelovanie uchopovania objektov pomocou neurónových sietí v robotickom simulátore iCub